Dynamic Formation Transformation and Obstacle Avoidance of Unmanned Vehicles
Info
Video demo (May take a while to load)

- Nominated to the 15th National College Student Innovation and Entrepreneurship Annual Conference
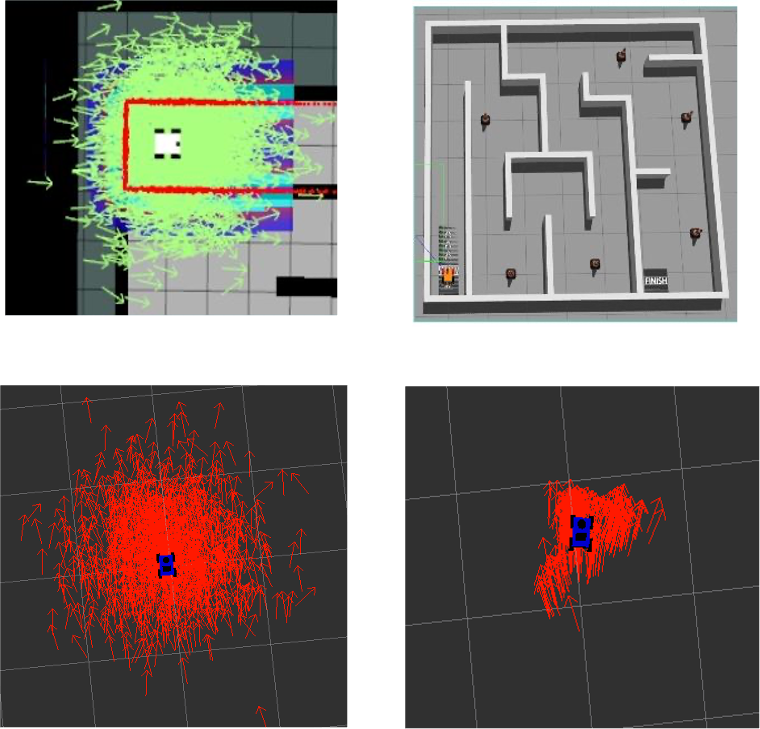
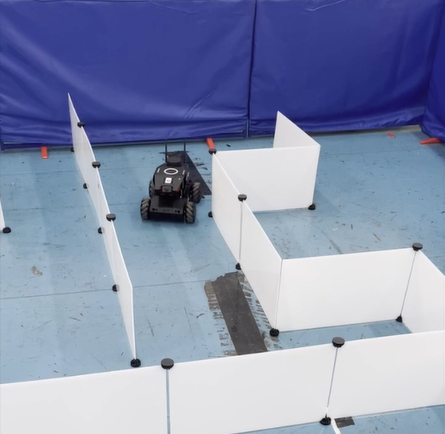
- Implemented autonomous obstacle avoidance based on slam(ROS packages) and multi-vehicle communication through wireless networking, mainly implemented the control of unmanned vehicle through ros system
- Implemented mapping and navigation functions with ROS packages, and and conducted simulation tests with gazebo