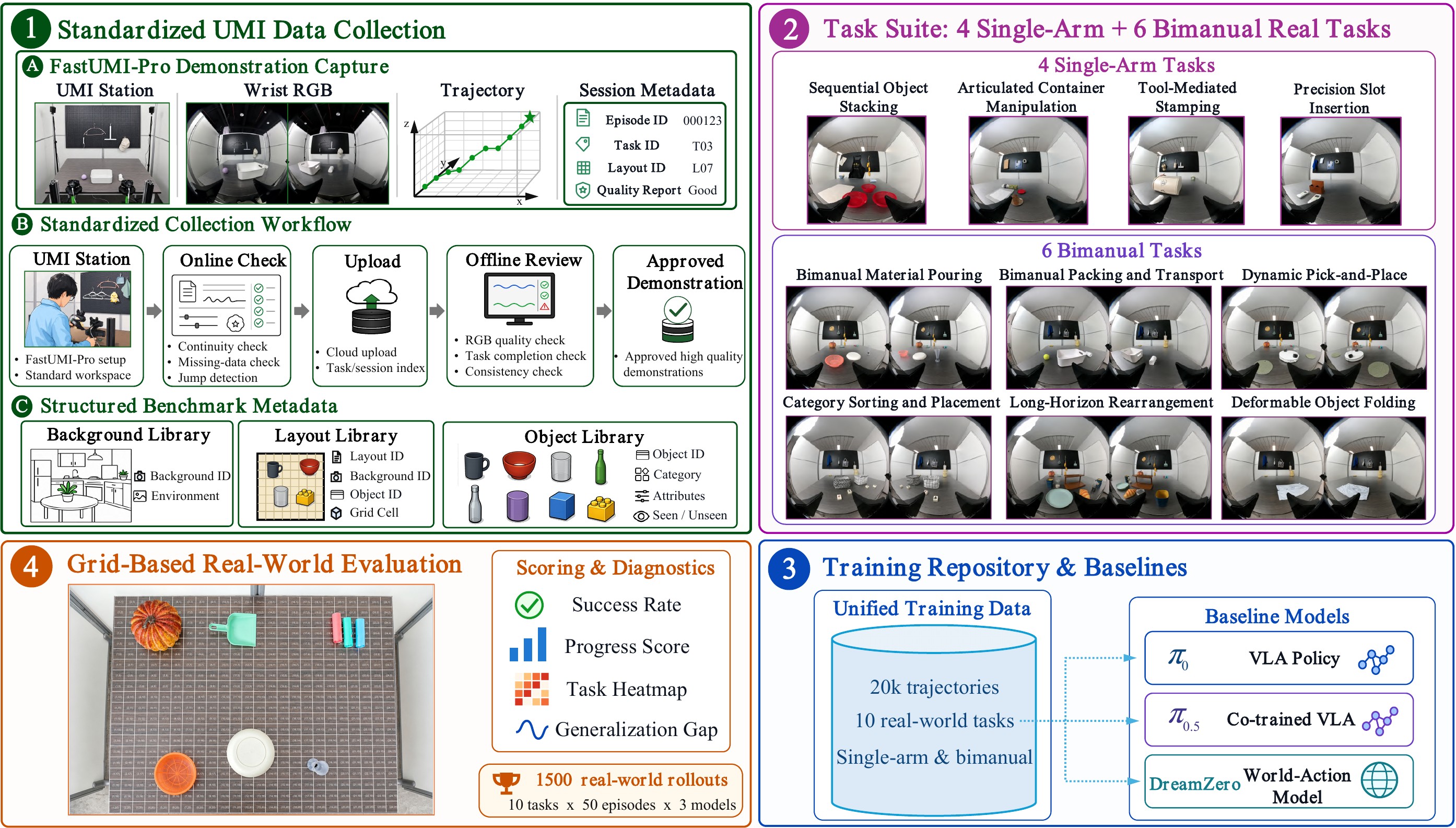
UMI-Bench 1.0: An Open and Reproducible Real-World Benchmark for Tabletop Robotic Manipulation with UMI Data
An open and reproducible real-world benchmark for tabletop robotic manipulation with UMI data; Xiaotong Li is the 7th author.
I am currently working as a VLA model researcher at Lumos Robotics, where I focus on robot manipulation and long-horizon tasks. My recent work includes depth-modality integration for VLA models, mask-guided object-centric manipulation, and improving non-Markovian long-horizon task execution through subtask decomposition and high-level memory modules. More broadly, I am interested in physical world models, VLA models, and robot learning that can understand and interact with the physical world.
I am seeking PhD opportunities in robotics, especially around physical world models, VLA models, and other related areas.
MSc Robotics, Delft University of Technology
BEng Aircraft Design and Engineering, Nanjing University of Aeronautics and Astronautics
Robotics Summer School, Korea Advanced Institute of Science & Technology (KAIST)
An open and reproducible real-world benchmark for tabletop robotic manipulation with UMI data; Xiaotong Li is the 7th author.
Reconstructing a geometrically accurate, articulation-aware, and physically meaningful digital twin from RGB-D observations of articulated objects.
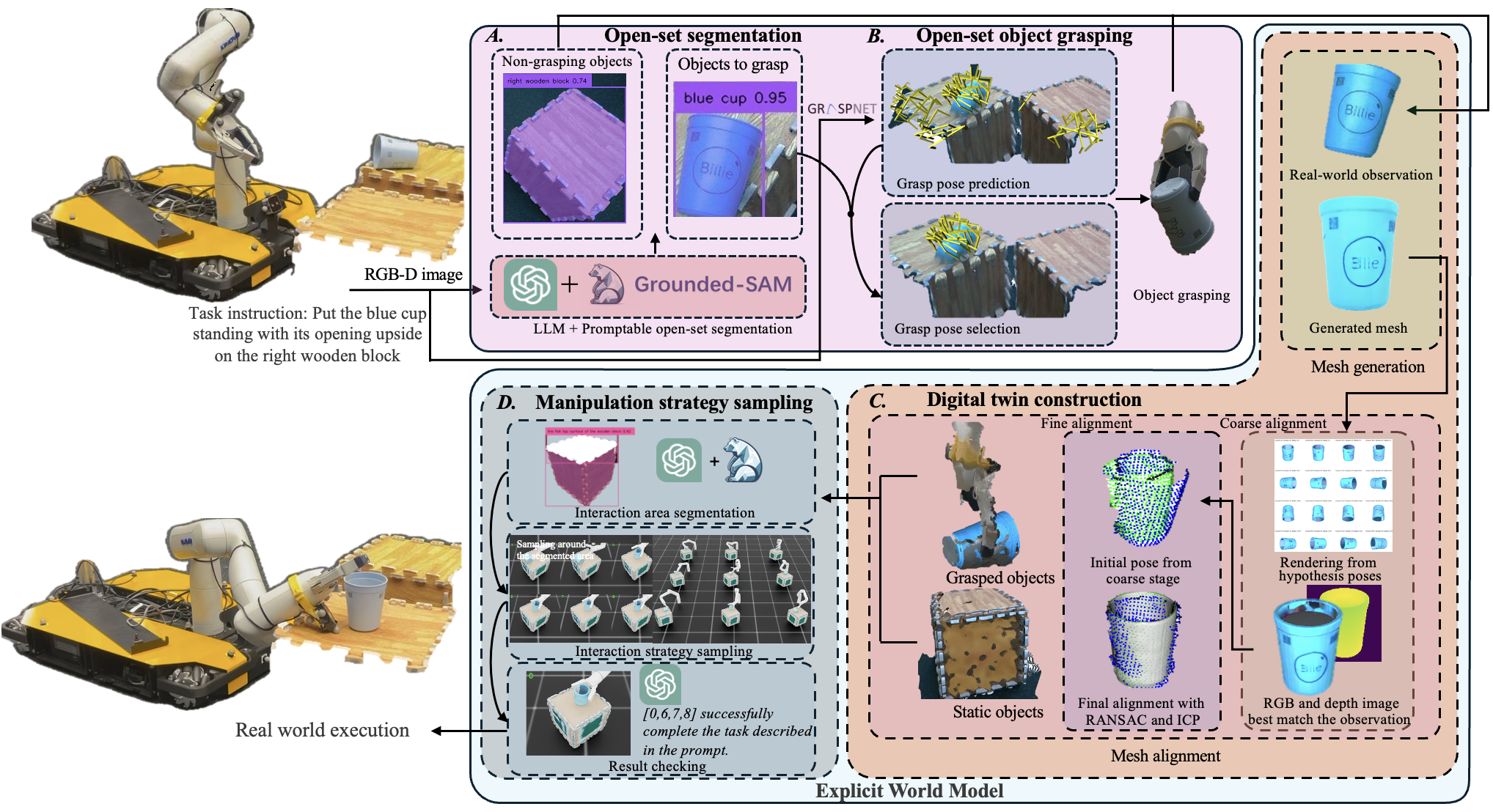
A manipulation framework that combines open-set perception, 3D digital twin reconstruction, and simulation-based strategy sampling without task-specific action demonstrations.
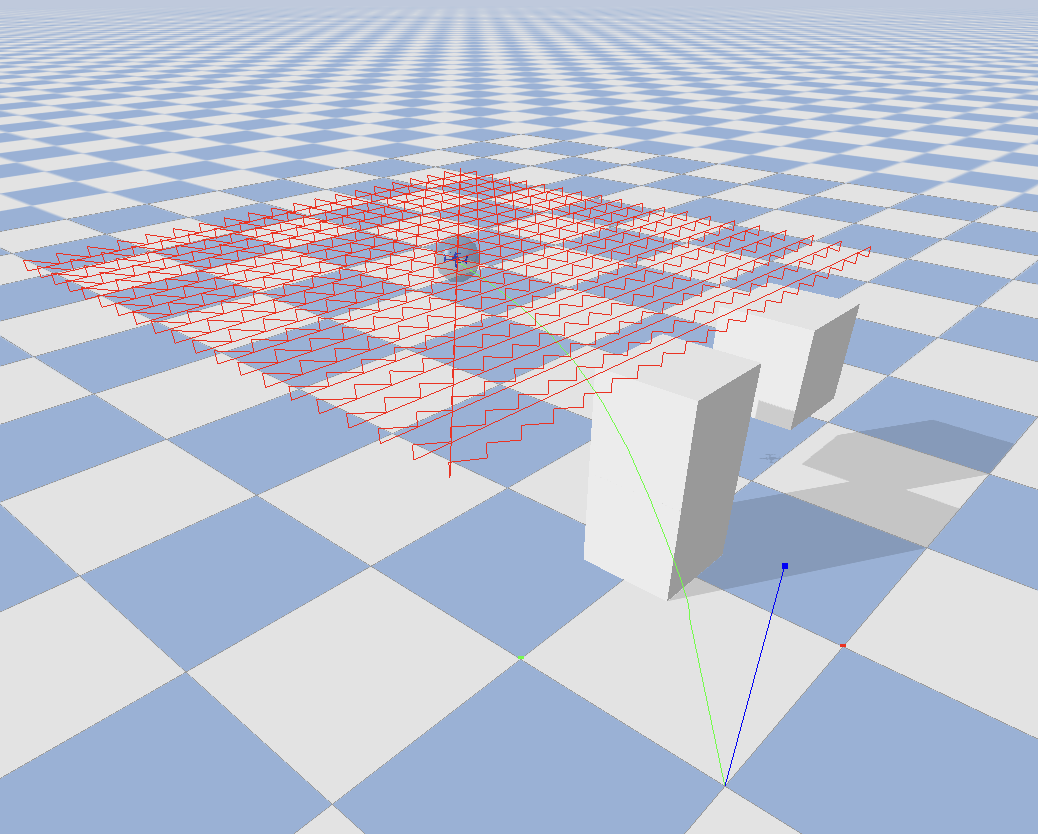
A model predictive control approach for trajectory tracking, collision avoidance, and planning of multiple UAVs in complex environments.
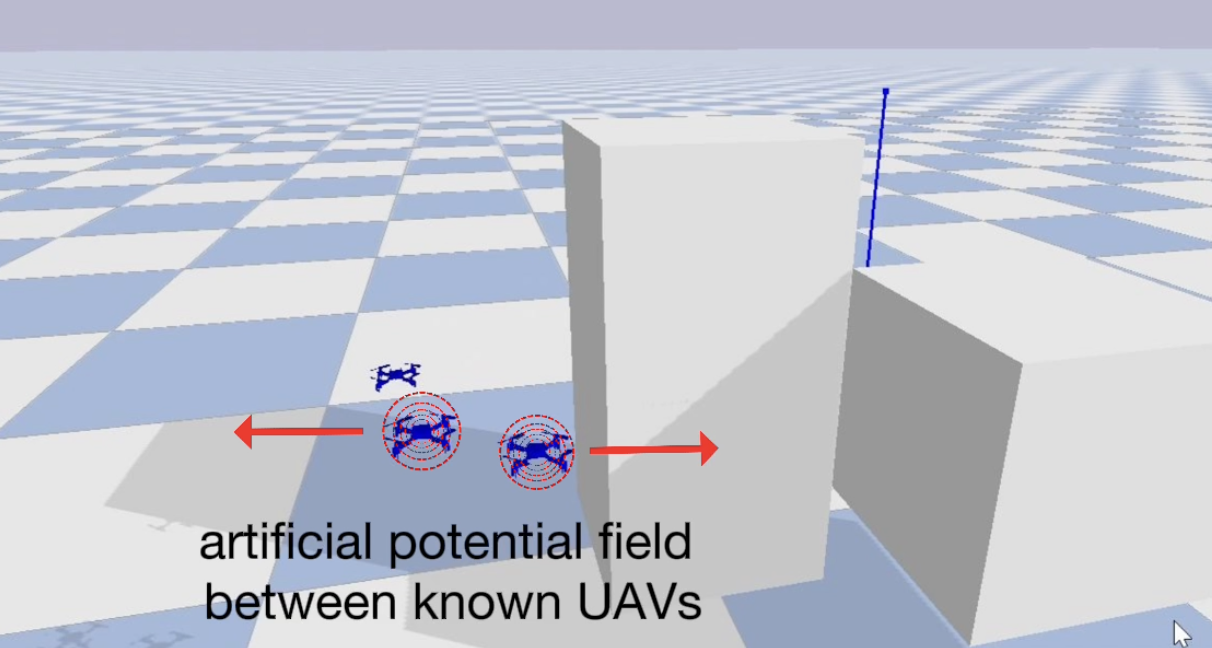
A two-stage planning approach for multi-UAV navigation using A*, MPC, and artificial potential fields.
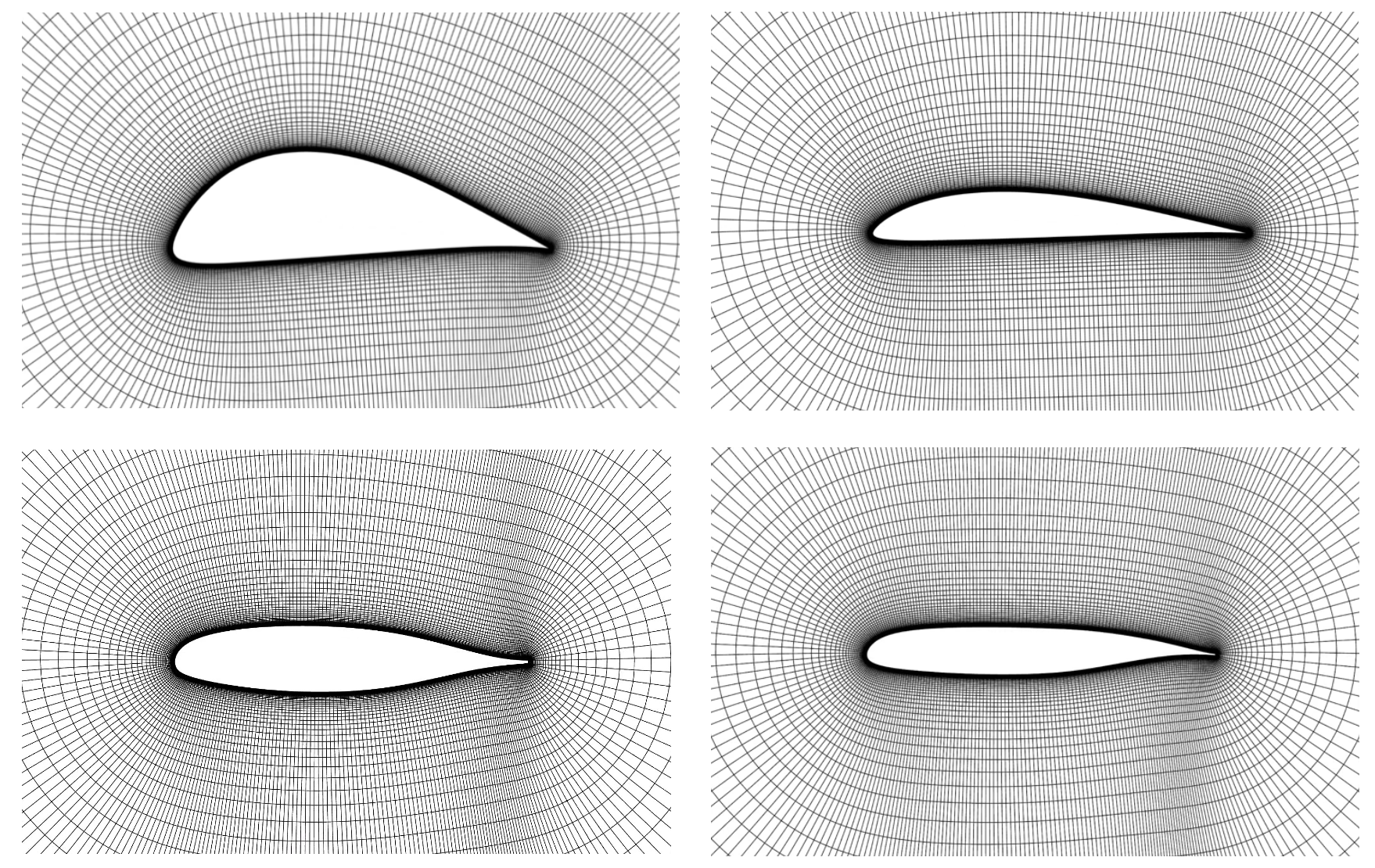
A surrogate-modeling approach that uses gradient-enhanced neural networks to accelerate low-Reynolds-number airfoil optimization.
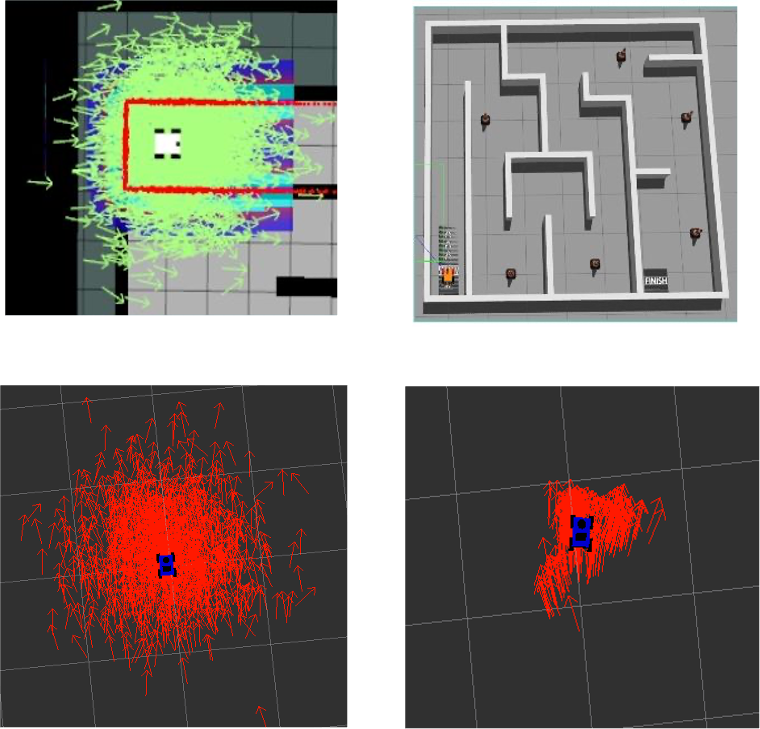
A ROS-based unmanned vehicle project for formation transformation, mapping, navigation, and obstacle avoidance.
Embodied AI Researcher, Lumos Robotics, Suzhou
Research Intern, TU Delft Autonomous Multi-Robots Lab, Delft
ROS Engineer, Bayer Crop Science, Shanghai
Email: xiaotongli0105@gmail.nl · GitHub: Bojack-BJ