Model Predictive Control Approach for Multi-UAVs Planning and Motion Control
A model predictive control approach for trajectory tracking, collision avoidance, and planning of multiple UAVs in complex environments.
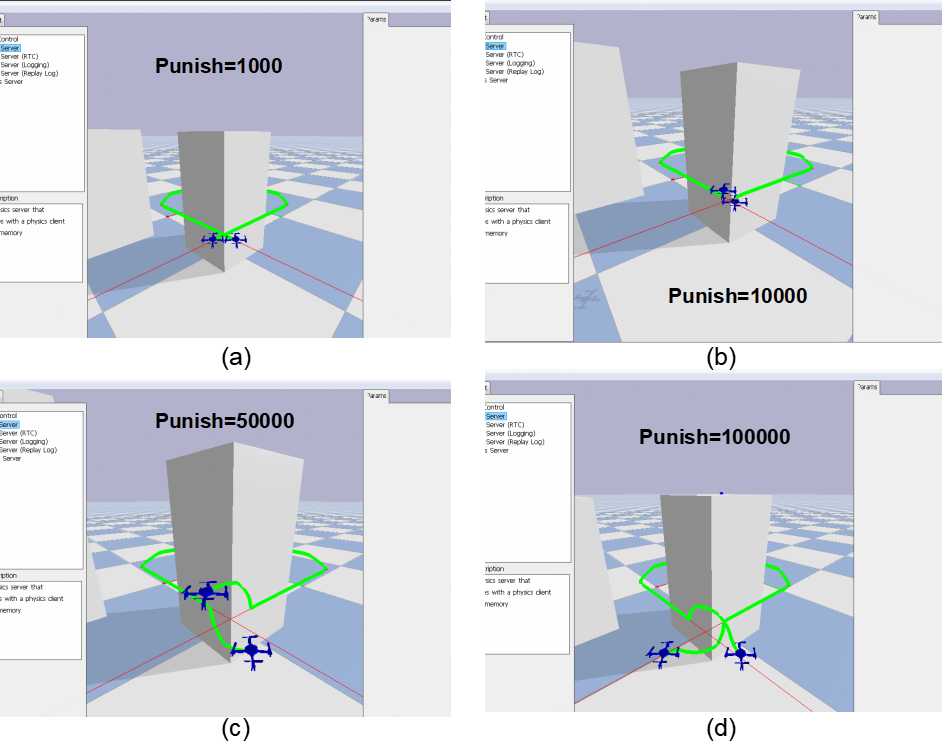
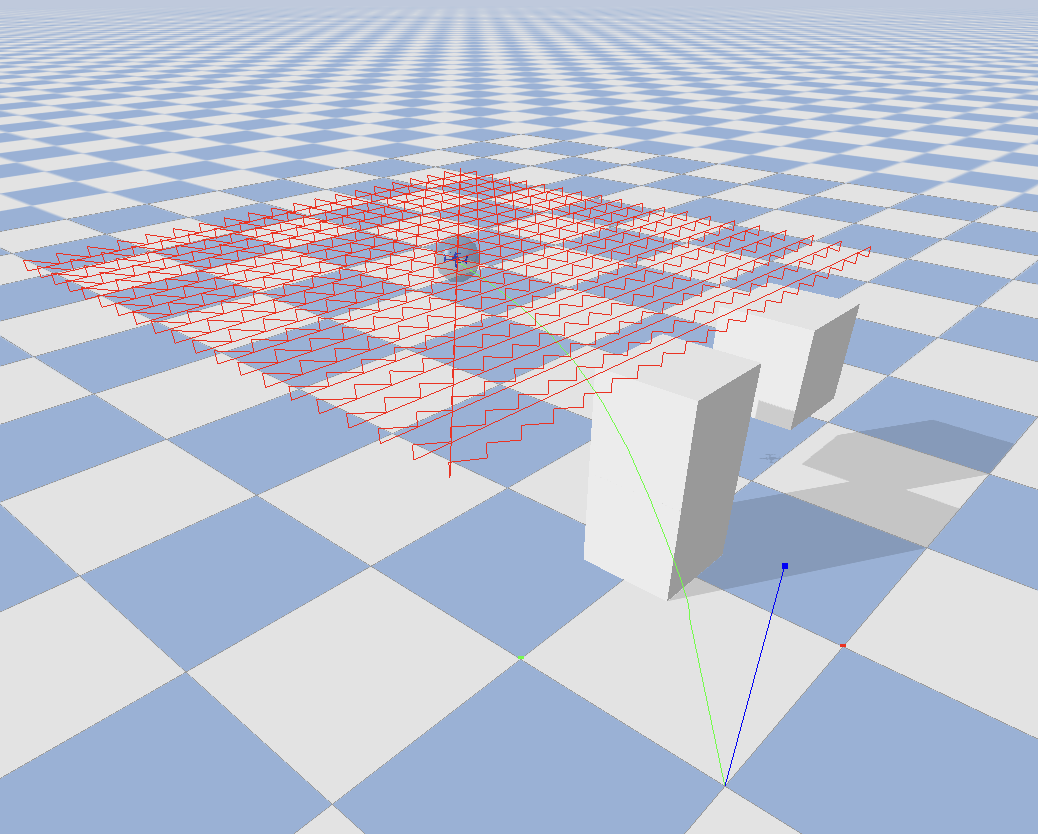
We implemented and simulated a model predictive control approach for multi-UAV control. A state-based MPC controller for single-UAV position control was first designed and used to study parameter effects. We then developed a path-planning method and output MPC strategy for trajectory tracking and collision avoidance with multiple UAVs in complex environments. A stability analysis was also performed to reason about controller behavior.