Model Predictive Control Approach for Multi-UAVs Planning and Motion Control
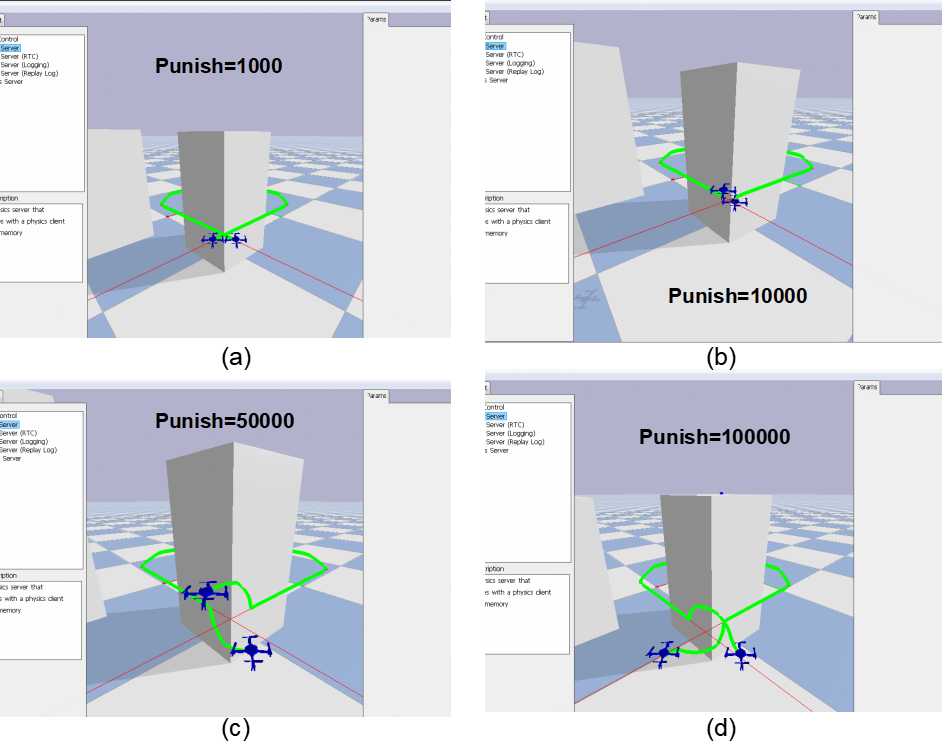
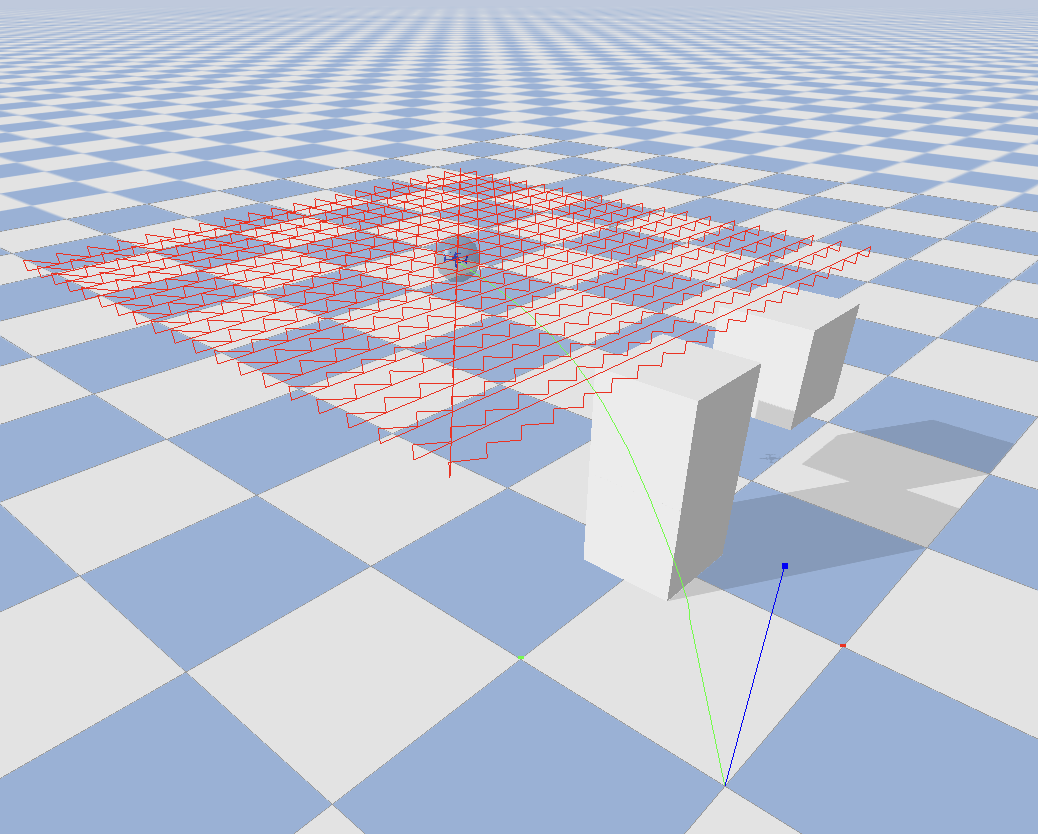
We implemented and simulated a Model predictive control (MPC) approach for multi-UAVs control. A state-based MPC approach for signal UAV position control was designed and was used to explore the effect of parameters on the results. Meanwhile, we designed a path-planning method and an output MPC method with trajectory tracking and collision avoidance for multiple UAVs in complex environments. A stability analysis is also performed to prove the stability of the approach. See Github for project details:
https://github.com/PatrickYang-5/MPC_drones
Paper PDF here